
 全国服务热线:
全国服务热线:
全国服务热线:
新的3DMGX7-GNSS/INS以3DMGX5-GNSS/INS的成功为基础,并添加了许多客户所需的功能,解决了特定用例中的常见挑战。该测试报告强调了四项进化改进:
•测试1:双天线固定航向
•测试2:抗磁干扰能力
•测试3:双天线+RTK vs 单天线
•测试 4:GNSS 衰减期间车轮里程计辅助
所有四项测试均使用轮式车辆完成,重点是两个传感器之间尽可能相似的物理配置:3DMGQ7 -GNSS/INS(又名 GQ7);和 3DMGX5 -GNSS/INS(又名 GX5,以前称为 GX5-45)。 GQ7 和 GX5 以相同的方向安装在坚固的箱子内,该箱子安装在车辆的底座上(见图 2)。 GQ7 的 GNSS 双天线和 GX5 的单 GNSS 天线安装在屋顶的邻近位置(见图 3)。对于每次测试,传感器设置都针对轮式车辆应用进行了适当配置。
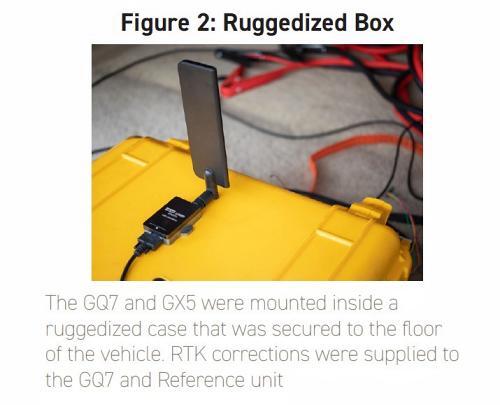
采用更高等级的惯性传感器,这里称为“参考”,作为GQ7和GX5比较误差计算的真实参考。 Reference 也安装在坚固的外壳中,并且在测试期间从同一蜂窝调制解调器同时向 GQ7 和 Reference 提供 RTCM 校正。

当由于磁干扰 (MI) 而无法使用磁力计时,单天线 GNSS/INS 导航传感器在低线性加速度期间无法获得精确且准确的航向。 GQ7 通过添加双天线航向辅助解决了这一挑战。在像 GX5 这样的系统中,在这些静止期间,航向会随着时间的推移而漂移,而 GQ7 将保持稳定的航向。
•高精度/低动态车辆应用
•极低的角速率
GQ7:双天线GNSS 和 GNSS 运动航向初始化、GNSS 位置和速度辅助、GNSS 航向辅助
GX5:(单天线)GNSS 速度矢量 GNSS 航向辅助
开车5分钟。停下来。保持静止 5 分钟漂移期。驾驶 1 分钟以突出偏航对位置精度的影响。
对于此测试用例,GQ7 的有限误差为 0.88°,GX5 在 5 分钟的静止期内以每分钟 0.87° 的速率漂移。

GQ7 解决了磁力计的常见挑战。如果几乎没有磁干扰 (MI),磁力计可以根据地球磁场提供准确的航向估计。如果附近的车辆、火车和齿轮箱等大型近端移动铁磁部件产生磁干扰,那么磁力计的校准和用作航向辅助源可能会具有挑战性甚至不可能。 GQ7 的双天线不易受 MI 影响,因此可以在这些情况下提供准确的航向 - 这在以前的单天线系统中是不可能实现的。
•高机械指数应用
•大型近端移动金属部件
•附近的车辆
•火车
•铁磁移动结构
•齿轮箱
•铁磁土动
GQ7:双天线GNSS 和 GNSS 运动航向初始化、GNSS 位置和速度辅助、GNSS 航向辅助
GX5:磁力计、单天线 GNSS 速度矢量、GNSS 航向辅助。
(注:对于此测试,自适应磁力计测量被关闭。启用后,它们会显着减少由于瞬态 MI 的磁干扰而导致的航向漂移,但不会完全消除它,特别是对于连续 MI。此配置说明了外部 MI 的实际效果适用于未实现类似瞬态 MI 算法的设备。)
行驶 8:30,停车 1 分钟,在 GQ7 和 GX5 附近保持恒定 MI 45 秒,保持停车 2 分钟,行驶 45 秒。
GQ7 的双天线航向不受 MI 影响,并在 MI 期间保持准确的航向,而 GX5 航向漂移量令人无法接受。

GQ7 与3DMRTK和SensorCloudRTK配合使用时,可在大多数主要城市地区提供 1cm + 1ppm 的位置精度,从而将位置精度提高 100 倍,并且覆盖范围始终在扩大。
•高定位精度(2-100cm)应用
•利用公共道路和人行道的应用
•送货无人机
•城市机器人
•自动驾驶汽车
•有腿机器人
•无人机系统
•无人机
GQ7:双天线GNSS 和 GNSS 运动学航向初始化、GNSS 位置和速度辅助、GNSS 航向辅助、使用3DM RTK 配置通信
GX5:单天线GNSS 速度矢量、GNSS 航向辅助。
开车5分钟。开车穿过与道路相邻的人行道的交叉路口。
•3DMGQ7+ 双天线 + RTK比GX5 单点 INS(200 至 2cm)精度提高 100 倍,满足 1cm + 1ppm 的规格,成本比REF(参考)低 6 倍
•右图是从道路测试到 GoogleEarth 街景的 4 种不同 GNSS/INS 传感器解决方案的叠加
•双天线 GNSS + INS + RTK的传感器融合可产生比分段 GNSS 接收器 + RTK更平滑的输出

GQ7 添加了一个辅助端口,为 GQ7 的卡尔曼滤波器提供外部输入。这些输入之一是车轮里程计(对于轮式车辆)。 GQ7 导航滤波器支持通过硬件编码器接口或数字消息输入进行外部速度测量。里程计辅助可以极大地提高 GNSS 中断情况下的导航性能。密歇根科学高分辨率车轮脉冲传感器 E512 用于协助该测试的里程表,如下图所示。

•GNSS 信号退化环境中的轮式车辆:“城市峡谷”、茂密植被多路径、隧道、GNSS 干扰/有争议的防御环境
GQ7:车轮里程计、双天线GNSS 和 GNSS 运动学航向初始化、零速度控制、 GNSS 位置和速度辅助、GNSS 航向辅助、使用3DM RTK适配器 配置通信
GX5:单天线GNSS 速度矢量、Zeri 速度控制、 GNSS 航向帮助。
开车5分钟。行驶时衰减GQ7和GX5的GNSS信号。行驶通过弯曲路段时保持衰减 1 分钟。
•在衰减过程中,由于其更高质量的 IMU 和里程计输入,GQ7 几乎保持在参考位置上,而 GX5 则漂移了 140 米。








